近日,我校电气与信息工程学院复杂系统与智能控制团队吕绍瑜博士在国际权威期刊《IEEE Transactions on Fuzzy Systems》(中科院一区Top期刊,影响因子11.9)上发表非线性系统模糊控制方向最新研究成果。我校为论文第一完成单位,青年教师吕绍瑜博士为论文第一作者,沈浩教授为论文通讯作者,研究工作得到国家自然科学基金等项目的资助。
在工程系统运行中,考虑到外部工作环境或物理组件的内部机械特性,系统状态不能在任何范围内随意改变,如多机器人协调控制、无人飞机编队等场景,这就要求整个系统在合理运行范围内接受一定条件的约束,一旦超出这些限制条件,系统部件有可能遭到破坏,甚至威胁到系统的稳定性。因此,在复杂非线性系统的实际工程应用中,如何在状态约束条件下保证系统的控制性能显得尤为重要。
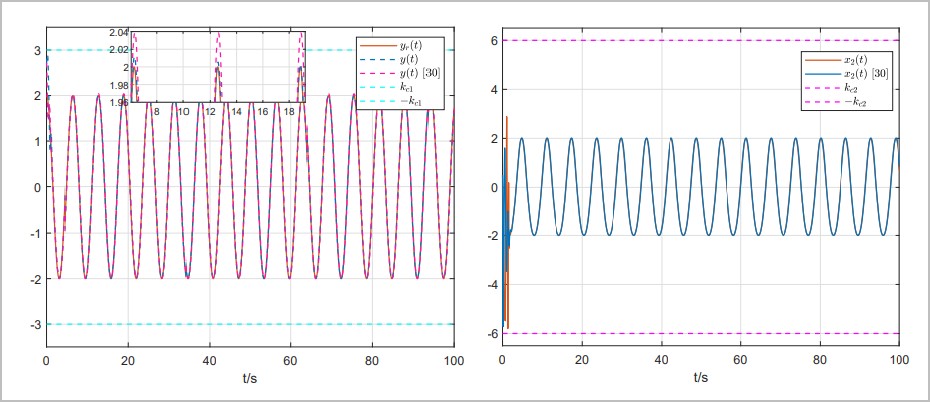
((a)全状态约束下输出轨迹跟踪参考信号对比 (b)全状态约束下状态信号对比)
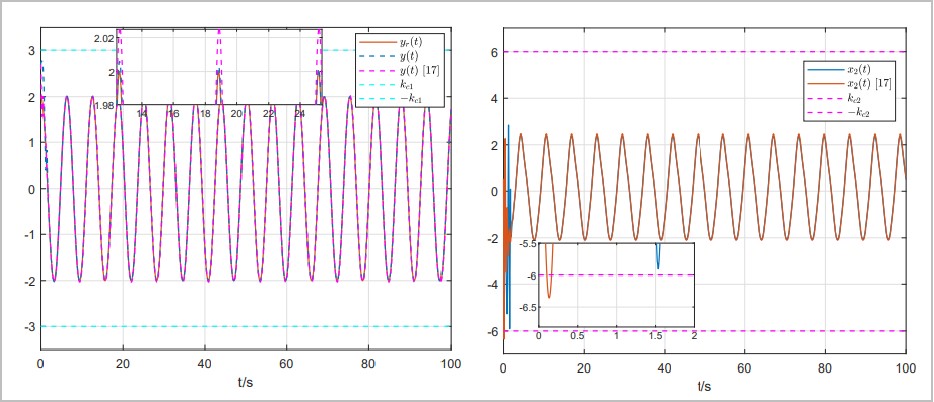
((c)全状态约束与无约束下输出轨迹跟踪参考信号对比 (d)全状态约束与无约束下状态信号对比)
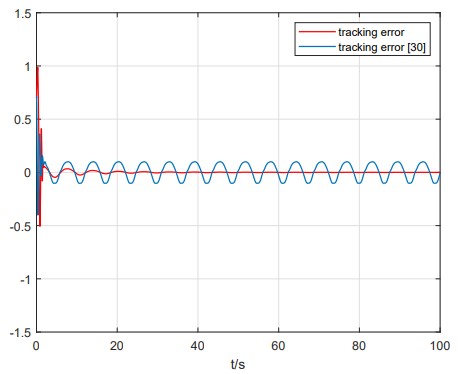
(全状态约束下跟踪误差对比)
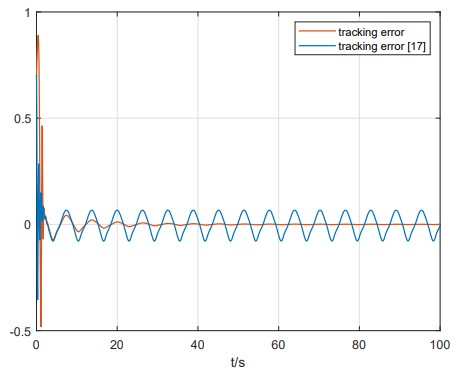
(全状态约束与无约束下跟踪误差对比)
团队针对一类具有状态约束下的不确定高阶严格反馈非线性系统,采用一种新型的基于模糊逻辑的自适应调节技术来辨识系统的不确定性和未知虚拟控制系数。通过设计一种带有自适应参数调节的非线性滤波器,消除在反步控制设计过程中由于重复微分引起的复杂计算问题,将自适应技术与积分函数相结合,以模糊逻辑控制算法解决了在全状态约束前提下的系统渐近跟踪控制难题。针对当前有关全状态约束控制的研究问题取得了有界跟踪结果,结合Lyapunov理论分析和对比仿真验证,均得到了系统全状态约束下渐近跟踪性能,仿真结果如图所示。研究结果进一步推动了具有状态约束的复杂非线性系统实际应用,为模糊控制和自适应滤波控制学习提供新的思路和方法。
论文链接:https://ieeexplore.ieee.org/document/10416713
(撰稿:吕绍瑜 李清莲 审核:程木田 沈浩 张苒 黄敏)







